Robotassistert operasjon: Ser du for deg en lettskremt, smånervøs C-3PO med skapell og munnbind bøyd over en pasient liggende på et operasjonsbord? Den første roboten som assisterte ved en operasjon het Arthrobot, utviklet og brukt første gang i Vancouver i 1984. Arthrobot kunne vri og flytte på pasientens bein på muntlig ordre fra kirurgen.
Litt historikk
Utover på 1980- og 90-tallet ble det utviklet roboter som kunne fungere som operasjonssykepleiere og forsyne kirurgen med instrumenter på stemmekommando, en medisinsk laboratorierobotarm, en robot som kunne orientere en nål for å utføre hjernebiopsier under CT-veiledning, og PROBOT, som kunne hjelpe til med å utføre prostataoperasjoner. Fordelene med PROBOT var dens lille størrelse, nøyaktighet og at den ikke gitt trøtt slik kirurger gjør. I 1992 ble ROBODOC introdusert og revolusjonerte ortopedisk kirurgi ved å hjelpe til med hofteproteseoperasjoner. ROBODOC var den første kirurgiske roboten som ble godkjent av FDA i 2008. ROBODOC kunne frese ut presise tilpasninger i lårbenet for hofteprotese, i motsetning til den gamle metoden med å skjære ut et lårben for et implantat ved bruk av en klubbe, en brotsj og en rasp.
En YouTube-video med tittelen Arthrobot – verdens første kirurgiske robot illustrerer noen av disse i drift.
Et stort fremskritt i utviklingen av robotsystemer kom da firmaet SRI International and Intuitive Surgical introduserte Da Vinci Surgical System and Computer Motion, med AESOP og ZEUS robotkirurgiske systemer.
Det som var spesielt med Da Vinci-systemet var at det var den første roboten som brukte en minimalt invasiv kirurgisk tilnærming som det heter på fint, altså kikkhullskirurgi. Systemet ble døpt «Da Vinci» delvis fordi Leonardo da Vincis studie av den menneskelige anatomien var opphav til utformingen av den første kjente roboten i historien.
AESOP var et gjennombrudd innen robotkirurgien da det ble introdusert i 1994. Det var den første laparoskopiske (kikkhullskirurgiske) kameraholderen som ble godkjent av FDA. NASA finansierte i utgangspunktet selskapet som produserer AESOP, Computer Motion. Målet var å lage en robotarm som kunne brukes i verdensrommet, men prosjektet endte opp med å bli et kamera brukt i kikkhullsprosedyrer. Stemmekontroll ble deretter lagt til i 1996 med AESOP 2000 og syv frihetsgrader for å etterligne en menneskelig hånd ble lagt til i 1998 med AESOP 3000.
ZEUS ble introdusert kommersielt i 1998 på ideen om tele-medisin også på operasjonsstua, hvor kirurgen sitter på en konsoll på et annet sted enn der roboten befinner seg, og styrer roboten som opererer pasienten.
Det originale telekirurgiske robotsystemet som da Vinci var basert på, ble utviklet ved Stanford Research Institute International med støtte fra DARPA og NASA – det amerikanske forsvaret og den amerikanske romfartsorganisasjonen. Selv om den telekirurgiske roboten opprinnelig var ment å forenkle fjernstyrte operasjoner på slagmarken og andre avsidesliggende miljøer, viste den seg å være mer nyttig for minimalt invasive operasjoner på stedet, altså hvor pasient, robot og kirurg befinner seg på samme sted. Patentene for den tidlige prototypen ble solgt til Intuitive Surgical i Mountain View, California.
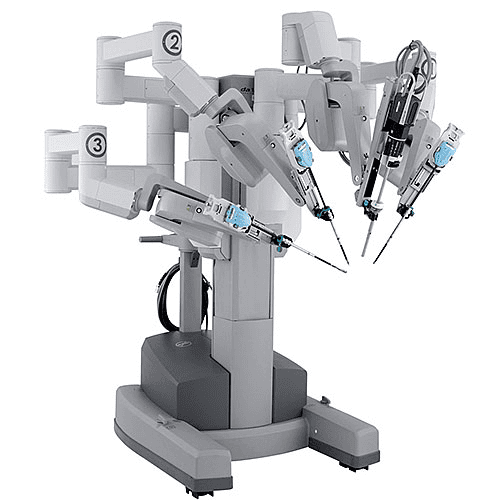
Da Vinci er en kul type. Den registrerer kirurgens håndbevegelser og oversetter dem elektronisk til nedskalerte mikrobevegelser for å håndtere de små instrumentene. Den oppdager og filtrerer ut eventuelle skjelvinger i kirurgens håndbevegelser, slik at de ikke dupliseres gjennom roboten. Kameraet som brukes i systemet har dobbel kameraoptikk som gir et ekte stereoskopisk bilde som overføres til en kirurgens konsoll. Da Vinci-roboten kan imitere det menneskelige håndleddet. I 2000 oppnådde da Vinci FDA-godkjenning for generelle laparoskopiske prosedyrer og ble den første operative kirurgiske roboten i USA. Da Vinci-systemet har blitt brukt til både robotassistert hjertebypass og nyretransplantasjoner.
Den første norske DaVinci-en ble installert på Radiumhospitalet i Oslo i desember 2004. Dette var starten på en helt ny kirurgisk æra på urologisk enhet på Radiumhospitalet. Kort tid etter installasjon var utstyret i bruk 3 dager pr. uke på urologisk enhet og 1 dag på gynekologisk enhet. I begynnelsen ble roboten mest brukt til prostataoperasjoner. Etter hvert har den også blitt brukt til både nyreoperasjoner og cystektomier (fjerning av blæra).
Da Vinci og cystektomier – en god kombinasjon?
Hva skjer med kirurger som får dette vidunderet mellom hendene? I en artikkel fra 2012, skrevet av legene Brennhovd og Axcrona, heter det: Robotutstyret koster nærmere 20 millioner i innkjøp. Serviceavtale er obligatorisk og koster ca. 1 million årlig. I tillegg kommer engangskostnader for hvert enkelt inngrep som er ca. 3 ganger høyere enn et tilsvarende åpent inngrep. Disse kostnadene fører til at utstyret må utnyttes flittig og høyvolumsentre utvikler seg som en naturlig konsekvens av dette. For kirurgene, som får et nytt effektivt instrument, vil kanskje indikasjonsstillingen lett gli mot et ønske om å få flere krevende utfordringer; å operere større svulster og fjerne flere lymfeknuter som sitter vanskeligere tilgjengelig.
Det fantes nesten ingen gode sammenligningsstudier som viste at roboten ga noen fordel, på den tiden. Noen surpomper (sett fra robotentusiastenes side) mente det var dyre greier for en dag eller to kortere liggetid og litt færre blodoverføringer. Motargumentet ble presentert med stor selvinnsikt:
De fleste robotkirurger, innebefattet oss på Radiumhospitalet, er fascinert av robotteknologien og svarer ofte på kritikken over: ”Det er ikke behov for, og nærmest uetisk, å gjennomføre randomiserte studier fordi det er så åpenbart for enhver som ser på en robotoperasjon at dette er overlegent bedre enn tradisjonell åpen operasjon”. Vi har prøvd å være oss bevisst at dette er et dårlig argument…
De tok selvkritikk på at dette ikke var godt nok argumentert. Nå foreligger det flere sammenligningsstudier.
Hva er best?
Svaret er: Noen operasjoner blir betydelig lettere å utføre med robot fordi man kommer mye bedre til i trange områder. Dette gjelder særlig prostatektomi. På Radiumhospitalet har de økt antall slike operasjoner formidabelt. Når det gjelder cystektomier skal vi gjengi resultatene fra en studie som ble presentert på den europeiske urologkongressen, EAU22, nå i år, av professor James Catto.
Roboten gir, sammenlignet med åpen operasjon (n= 306 pasienter, jevnt fordelt på de to gruppene):
- 2 dager kortere liggetid
- litt færre blodoverføringer
- litt færre reinnleggelser (men ingen effekt på antall liggedøgn ved reinnleggelse)
- ingen forskjell i overlevelse
- færre sårinfeksjoner og blodpropper etter operasjonen
- bedre generell livskvalitet etter 5 uker, men effekten er utlignet 12 uker etter operasjon
- bedre kreftspesifikk livskvalitet ved 5 og 12 uker, men effekten er utlignet etter 26 uker
- ingen forskjell på mobilitet (hvor langt man går og hvor mye man går) etter operasjonen
- ingen forskjell i tilbakefall av kreftsykdommen
Det store spørsmålet blir da: er disse forskjellene av reell betydning for pasienten? Det denne studien ikke viser, men som pasientene kan tenke på, er hvor viktig det er at kirurgen kommer til på trange steder (som for eksempel hvis man skal sy et kort kvinnelig urinrør på en erstatningsblære) og hvor viktig det er at kirurgen har oversikt over et større preparat (som når man skal sy en tarmbit på 70 cm om til et kontinent reservoar med ventilfunksjon slik at man ikke trenger utvendig pose på magen, type Lundiana). Husk at man kan konvertere en robotoperasjon til en åpen operasjon og ta noe bra fra begge verdener.
Vi er bekymret for at mer bruk av Da Vinci gir færre pasienter tilbud om erstatningsblære eller kontinent urostomi/Lundiana. Det vil vi prøve å motvirke.